iFBalance
iFThings 앱으로 제어하는 영상 ( https://youtu.be/h36lYpCpGQE )
iFBalance 라인트랙 주행영상 ( https://youtu.be/VFz27Y_Ooxg?t=0s )

ESP32_PICO_V3와 MPU9250, BMP388 등을 내장한 아두이노 호환 보드인 iFZero보드를 기반으로 C/C++ 및 MicroPython 등을 활용할 수 있는 STEM 코딩교육을 목적으로 개발이 되었습니다. 또한 안드로이드/아이폰 스마트폰으로도 제어가 가능한 앱도 개발이 되었습니다.
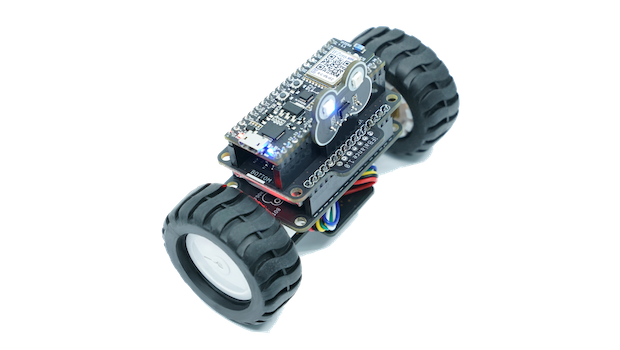
스마트폰으로 제어가 가능한 밸런싱 로봇에서 시작하여 보다 진보된 형태의 자율주행 알고리즘 기반으로 진화해 가는 iFBalance 로봇이 될 것입니다.
MCU 보드 특징
- MCU 보드 : iFZero 보드
- 10축 센서 :
- MPU9250 IMU( 관성항법장치 )
- BMP 388( 기압계 센서 )
- 동작 전압 : 3.3V
- 버튼 :
- 리셋
- GPIO0 버튼
- LED
- TX ( Blue )
- 전원 연결 표시 ( RED )
- GPIO4( Blue )
- USB2Serial CP2102 칩 사용
- Micro USB 컨넥터
- 개발 환경
- Arduino
- Visual Studio Code ( PlatformIO )
- Native
- KC 전파인증 완료
iFBalance 특징
- 엔코더가 내장된 DC 모터 구동 x 2 EA
- IR Line Track 검출 센서 ( 7 쌍 )
- 리튬폴리머 배터리 3.7V, 700mA
- 고무 바퀴 ,브라켓
- ToF ( 레이저 : 거리 ) 센서
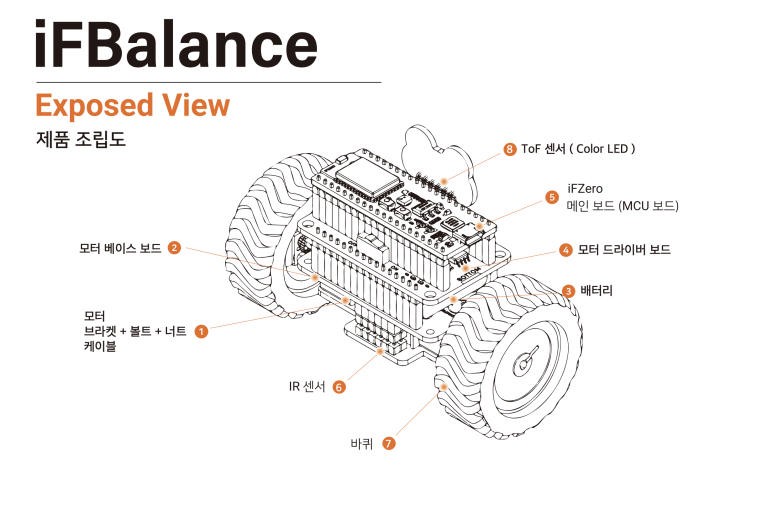
iFBalance 조립도
기본적으로 판매되는 제품은 모터에 연결된 케이블을 배선하는 것이 난이도가 높아서 조립된 상태로 제공이 됩니다.
조립도는 참고만 하시기 바랍니다.