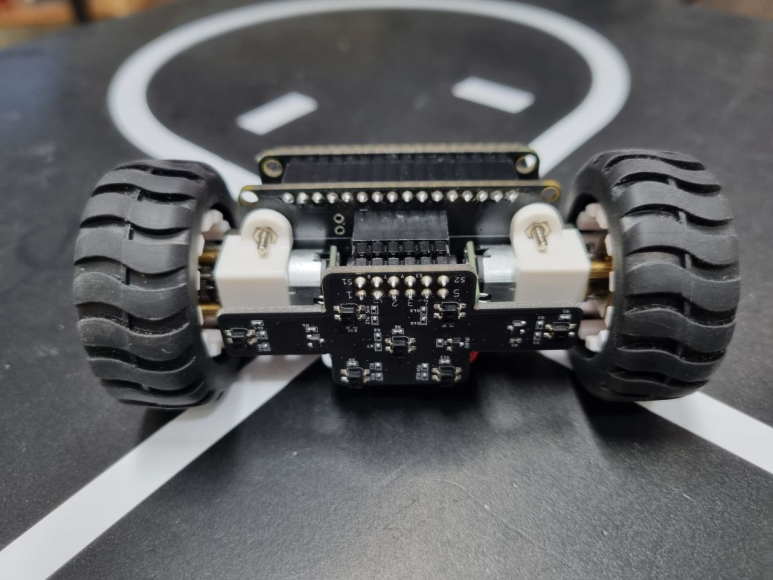
9강. IR 센서 동작하기 iFBalance의 IR센서는 모두 7조로 구성이 되어 있습니다.
안정적으로 움직이는 iFLine과는 다르게 iFBalance는 중심을 잡기 위해 앞뒤로 혹은 옆으로도 조금씩 움직이는 구조이다 보니 iFBalance의 중심부에 5조의 센서들이 모여 있도록 설계가 되어 있습니다.
즉, 하기 코드 처럼
센서들은 발광한 다음 100 마이크로초 지연후 ADC를 수행합니다.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 digitalWrite ( 5 , HIGH ); digitalWrite ( 20 , LOW ); digitalWrite ( 4 , LOW ); delayMicroseconds ( 100 ); m_nADCRaw[0 ] = adc1_get_raw((adc1_channel_t )m_channels[0 ]); m_nADCRaw[3 ] = adc1_get_raw((adc1_channel_t )m_channels[3 ]); m_nADCRaw[6 ] = adc1_get_raw((adc1_channel_t )m_channels[6 ]); digitalWrite ( 5 , LOW );digitalWrite ( 20 , LOW );digitalWrite ( 4 , HIGH ); delayMicroseconds ( 100 ); m_nADCRaw[2 ] = adc1_get_raw((adc1_channel_t )m_channels[2 ]); m_nADCRaw[4 ] = adc1_get_raw((adc1_channel_t )m_channels[4 ]); digitalWrite ( 5 , LOW );digitalWrite ( 20 , HIGH ); digitalWrite ( 4 , LOW ); delayMicroseconds ( 100 ); m_nADCRaw[1 ] = adc1_get_raw((adc1_channel_t )m_channels[1 ]); m_nADCRaw[5 ] = adc1_get_raw((adc1_channel_t )m_channels[5 ]); digitalWrite ( 20 , LOW );
각각의 GPIO에 할당된 ADC 채널은 다음과 같습니다.
1 2 3 4 5 6 7 8 case GPIO_NUM_36: channel = ADC1_CHANNEL_0; break ;case GPIO_NUM_37: channel = ADC1_CHANNEL_1; break ;case GPIO_NUM_38: channel = ADC1_CHANNEL_2; break ;case GPIO_NUM_39: channel = ADC1_CHANNEL_3; break ;case GPIO_NUM_32: channel = ADC1_CHANNEL_4; break ;case GPIO_NUM_33: channel = ADC1_CHANNEL_5; break ;case GPIO_NUM_34: channel = ADC1_CHANNEL_6; break ;case GPIO_NUM_35: channel = ADC1_CHANNEL_7; break ;
위 IR센서의 수광부를 위해 동작하는 GPIO들은 모두 ADC 1번 채널을 사용하고 있습니다.
다음은 IR센서를 구동하는 iFIRSensor 동작 소스코드입니다.
iFIRSensor.cpp 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 #include <Arduino.h> #include "iFIRSensor.h" #include "iFPID.h" TaskHandle_t iFIRSensor::taskHandle = NULL ; portMUX_TYPE iFIRSensor::mux = portMUX_INITIALIZER_UNLOCKED; SemaphoreHandle_t iFIRSensor::xMutex; uint16_t iFIRSensor::m_nADCRaw[ SENSOR_COUNT ]; adc1_channel_t iFIRSensor::m_channels[ SENSOR_COUNT ];portTickType iFIRSensor::delayTasks = 1000 ; iFIRSensor::iFIRSensor(){ m_adcBit = ADC_WIDTH_12Bit; } uint16_t iFIRSensor::get (const int id) return m_nADCRaw[id]; } void iFIRSensor::calc () digitalWrite ( 5 , HIGH ); digitalWrite ( 20 , LOW ); digitalWrite ( 4 , LOW ); delayMicroseconds ( 100 ); m_nADCRaw[0 ] = adc1_get_raw((adc1_channel_t )m_channels[0 ]); m_nADCRaw[3 ] = adc1_get_raw((adc1_channel_t )m_channels[3 ]); m_nADCRaw[6 ] = adc1_get_raw((adc1_channel_t )m_channels[6 ]); digitalWrite ( 5 , LOW ); digitalWrite ( 20 , LOW ); digitalWrite ( 4 , HIGH ); delayMicroseconds ( 100 ); m_nADCRaw[2 ] = adc1_get_raw((adc1_channel_t )m_channels[2 ]); m_nADCRaw[4 ] = adc1_get_raw((adc1_channel_t )m_channels[4 ]); digitalWrite ( 5 , LOW ); digitalWrite ( 20 , HIGH ); digitalWrite ( 4 , LOW ); delayMicroseconds ( 100 ); m_nADCRaw[1 ] = adc1_get_raw((adc1_channel_t )m_channels[1 ]); m_nADCRaw[5 ] = adc1_get_raw((adc1_channel_t )m_channels[5 ]); digitalWrite ( 20 , LOW ); } void iFIRSensor::taskSensor (void *pvParameter) while (1 ){ calc(); vTaskDelay( 4 ); } } int iFIRSensor::analogRead (int id) m_nADCRaw[id] = adc1_get_raw((adc1_channel_t )m_channels[id]); return m_nADCRaw[id]; } void iFIRSensor::init () pinMode ( 5 , OUTPUT ); pinMode ( 20 , OUTPUT ); pinMode ( 4 , OUTPUT ); digitalWrite ( 5 , LOW ); digitalWrite ( 20 , LOW ); digitalWrite ( 4 , HIGH ); for (int i=0 ; i<SENSOR_COUNT; i++){ pinMode (m_nPins[i], INPUT_PULLDOWN); m_channels[i] = getChannelforADC1( m_nPins[i] ); adc1_config_channel_atten((adc1_channel_t )m_channels[i], atten); } adc1_config_width( m_adcBit ); esp_adc_cal_value_t val_type = esp_adc_cal_characterize( unit, atten, m_adcBit, DEFAULT_VREF, &adc_chars); xTaskCreatePinnedToCore(&taskSensor, "taskSensor" , 1024 , (void *)&delayTasks, uxTaskPriorityGet(NULL ), &taskHandle, 0 ); printf ("val_type = %d \n" , val_type); } adc1_channel_t iFIRSensor::getChannelforADC1 (int gpio) adc1_channel_t channel = ADC1_CHANNEL_0; switch ( gpio ){ case GPIO_NUM_36: channel = ADC1_CHANNEL_0; break ; case GPIO_NUM_37: channel = ADC1_CHANNEL_1; break ; case GPIO_NUM_38: channel = ADC1_CHANNEL_2; break ; case GPIO_NUM_39: channel = ADC1_CHANNEL_3; break ; case GPIO_NUM_32: channel = ADC1_CHANNEL_4; break ; case GPIO_NUM_33: channel = ADC1_CHANNEL_5; break ; case GPIO_NUM_34: channel = ADC1_CHANNEL_6; break ; case GPIO_NUM_35: channel = ADC1_CHANNEL_7; break ; } return channel; }
iFIRSensor 센서 클래스는 이전 iF 클래스들과 마찬가지로 init() 함수를 가지고 있습니다.
한가지 주의할 점이 있습니다.
실제 ESP32 FreeRTOS 를 사용하는 펌웨어에서 가급적이면 빠른 스피드로 제어 기능을 구현할 때엔 테스크의 갯수를 최소로 하는 것이 좋습니다. 태스크의 루프는 일정 시간을 소모합니다.
참고하시기 바랍니다.
iFIRSensor.h 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 #pragma once #include <Arduino.h> #include "driver/adc.h" #include "esp_adc_cal.h" #include "driver/mcpwm.h" #define DEFAULT_VREF 1100 #define SENSOR_COUNT 7 class iFIRSensor { private : uint8_t m_nPins[ SENSOR_COUNT ]; static TaskHandle_t taskHandle; static uint16_t m_nADCRaw[ SENSOR_COUNT ]; static adc1_channel_t m_channels[ SENSOR_COUNT ]; public : static portMUX_TYPE mux; static SemaphoreHandle_t xMutex; static portTickType delayTasks; private : adc_bits_width_t m_adcBit; const adc_atten_t atten = ADC_ATTEN_DB_6; const adc_unit_t unit = ADC_UNIT_1; esp_adc_cal_characteristics_t adc_chars; public : iFIRSensor(); iFIRSensor(uint8_t pin1, uint8_t pin2, uint8_t pin3, uint8_t pin4, uint8_t pin5, uint8_t pin6, uint8_t pin7, adc_bits_width_t bit = ADC_WIDTH_12Bit){ m_nPins[0 ] = pin1; m_nPins[1 ] = pin2; m_nPins[2 ] = pin3; m_nPins[3 ] = pin4; m_nPins[4 ] = pin5; m_nPins[5 ] = pin6; m_nPins[6 ] = pin7; m_adcBit = bit ; } void init () void setPin (const int id, uint8_t pin) m_nPins[id] = pin; } void setADCBits (adc_bits_width_t bit = ADC_WIDTH_12Bit) m_adcBit = bit ; } static void calc () static void taskSensor (void *pvParameter) uint16_t get (int id) int analogRead (int id) adc1_channel_t getChannelforADC1 (int gpio) };
main.cpp 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 iFIRSensor ifIRSensor ( 37 , 34 , 36 , 32 , 35 , 33 , 38 , ADC_WIDTH_BIT_12) ;uint16_t m_irValue[5 ];uint16_t m_irPrevValue[5 ];int16_t m_irDif[5 ];void setup () .... ifIRSensor.init(); } int irLoop = 0 ;void loop () bool isIMUUpdate = false ; uint32_t distance = 0 ; if (xSemaphoreTake( iFVL53LX::xMutex, portMAX_DELAY ) == pdTRUE){ isIMUUpdate = ifMpu.update(); distance = ifVL53LX.getDistance(); } xSemaphoreGive( iFVL53LX::xMutex ); if (isIMUUpdate) { .... if ( irLoop++ > 50 ){ irLoop = 0 ; for ( int i=0 ; i<7 ; i++){ m_irValue[i] = ifIRSensor.get (i); Serial .printf ("[%d]= %d " , i , m_irValue[i]); } Serial .println (" " ); } } }
수신된 센서값은 흰색 라인에서는 값이 작아지고 검은색 영역에서는 값이 크게 나타납니다.
iFBalance 9강 소스 파일 : iFBalance_09.zip
>> Download
iFBalance IR Sensor 동작 영상 Shoot by Serimo on 2021-3-09 iFBalance IR Senso 동작 영상