iFBalance 강의 목표
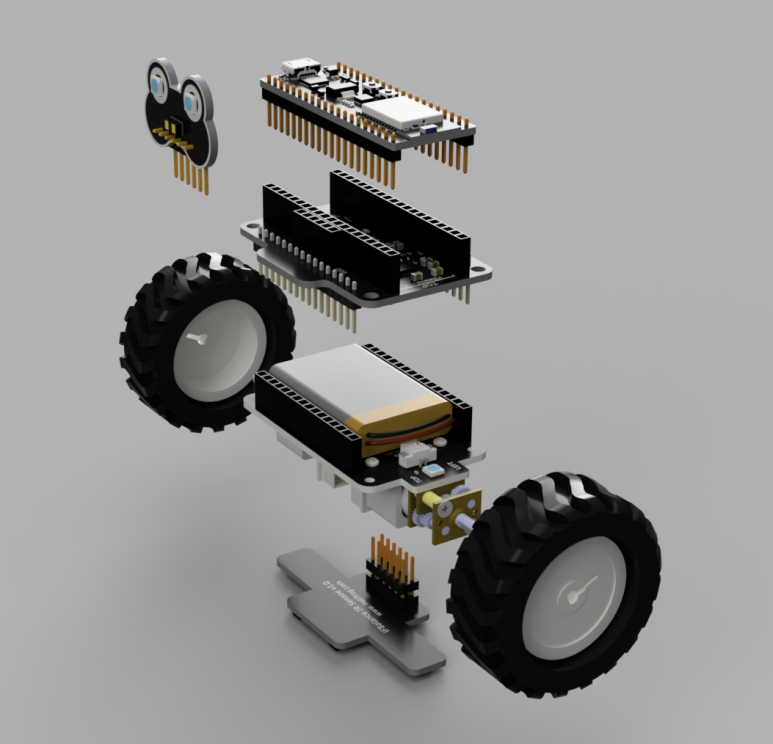
iFBalance는 두 바퀴로 밸런스를 유지하면서 동작하는 세상에서 가장 작은 두 바퀴 밸런싱 로봇이라고 감히 말할 수 있습니다. 자동제어 공학의 핵심인 PID 제어를 기반으로 한 역진자 제어 기술과 비슷하면서도 iFBalance 로봇만의 여러 하드웨어적인 특성이 존재합니다.
이 강좌에서는 iFBalance 로봇을 기반으로 다음과 같은 교육 과정을 진행할 예정입니다.
- C++ 및 Free RTOS 기반으로 하드웨어를 제어하는 코딩 학습
- 관성 항법 장치( IMU : MPU9250, 9축센서 )와 ToF 센서, 기타 센서 등의 특성 분석 및 제어
- PC 기반의 파이썬과 연동하여 AI 및 시스템 특성을 분석하고 디버깅하는 방법 학습
- 수학, 물리 및 전자공학의 신호처리, 자동제어 이론을 기반으로 코딩에 접목하는 방법 학습
위와 같이 iFBalance를 기반으로 C/C++, Python 언어를 학습하고 IoT 및 AI 학습을 하는데 있어서 Fun이 가미된 재미있는 코딩 교육을 목표로 하고 있습니다.
제품 개발을 기획하고 수행하는 과정은 고행과도 같습니다. 생각하고 나서 뚝닥하고 만들어지면 아마도 그것은 경쟁력이 없는 누구나 만들 수 있는 그런 제품일 수 있습니다.
좋은 제품을 개발하기 위해 최선을 다하는 것은 결국 좋은 결과가 나올 수 있는 지름길입니다. 그러긴 위해선 먼저 기본기가 충실해야 합니다. 학생시절에 꾾임없는 도전과 시도는 억만금을 들여서라도 해봐야 합니다.
기나긴 자기 노력에 의해 목표에 도달하고 또 다음 목표를 향해서 도전하는 자세는 엔지니어에게는 숙명과도 같은 것입니다.
아래 그림에서 처럼 개발 과정에서 목표에서 이탈한 버전들이 여렷 존재합니다. 이러한 과정없이 진행하는 것이 실력있는 개발자이겠지만 실제로는 거의 존재하지 않습니다.
수많은 시행착오를 거치고 노하우가 쌓인 후에 비로소 완성작을 볼 수 있습니다.
iFBalance는 그러한 가치가 있는 훌륭한 교육용 로봇 제품이라고 생각합니다.
부디 다음 세대를 짊어질 우리 후배들이 이 제품을 통해서 세계를 이끌어갈 훌륭한 엔지니어의 꿈을 그려 볼 수 있기를 기대합니다.
감사합니다.
