4강. DC 모터 제어하기
아래 그림은 iFBalance 로봇에서 사용된 iFZero 보드의 GPIO에 할당된 Pin Map입니다. iFBalance는 iFLine 보다 IR 센서부가 좀 더 복잡하기 때문에 제어 및 ADC 핀이 추가 할당이 되어 있습니다.
그러나 DC 모터를 제어하는 부분은 iFLine보다 줄어서 다행히 여분의 GPIO가 2개정도 남은 상태입니다.
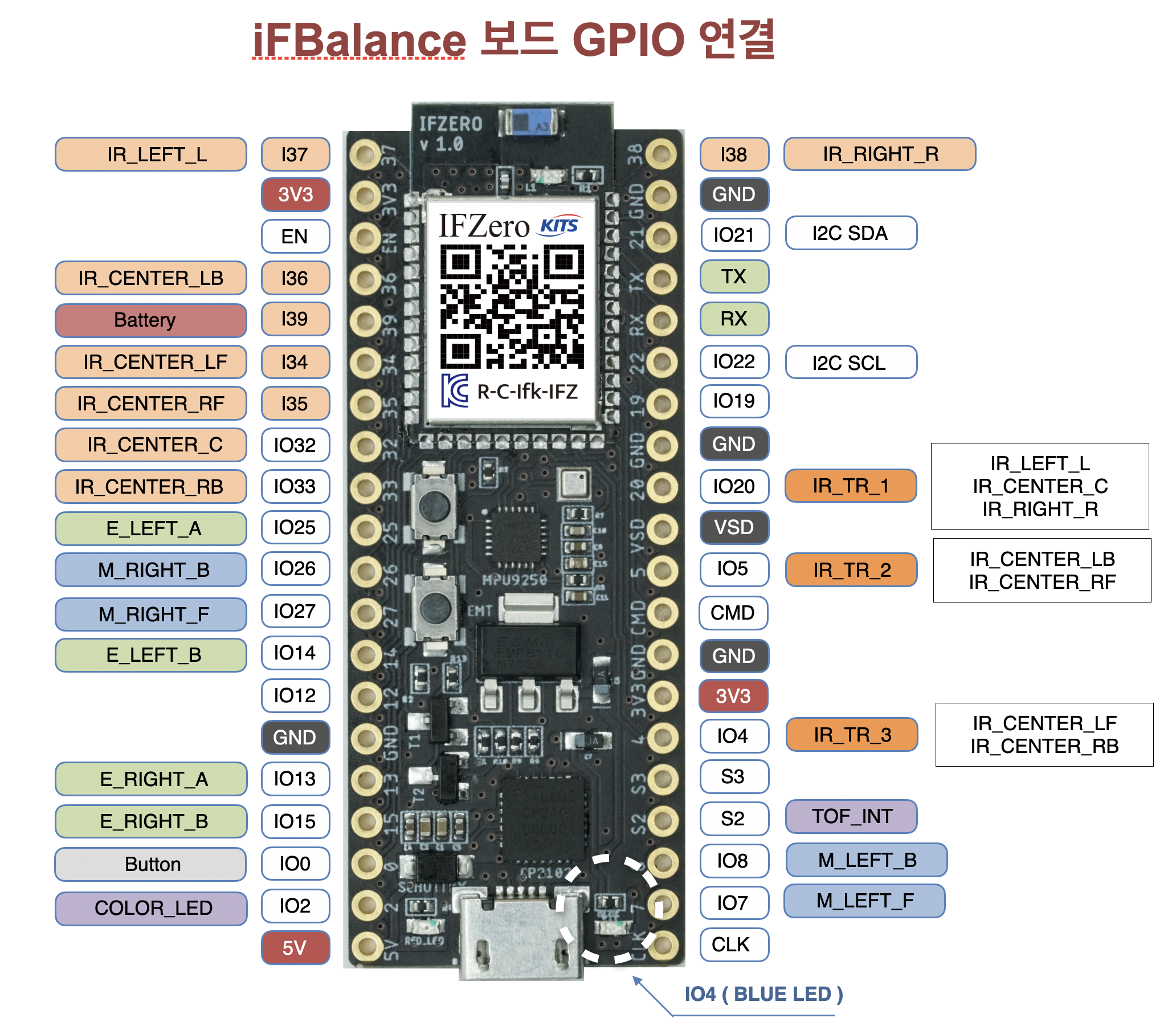
DC 모터를 제어하기 위해 할당된 GPIO는 다음과 같다.
Motor Control GPIO
LEFT_WHEEL_FORWARD IO7
LEFT_WHEEL_BACKWARD IO8
RIGHT_WHEEL_FORWARD IO27
RIGHT_WHEEL_BACKWARD IO26
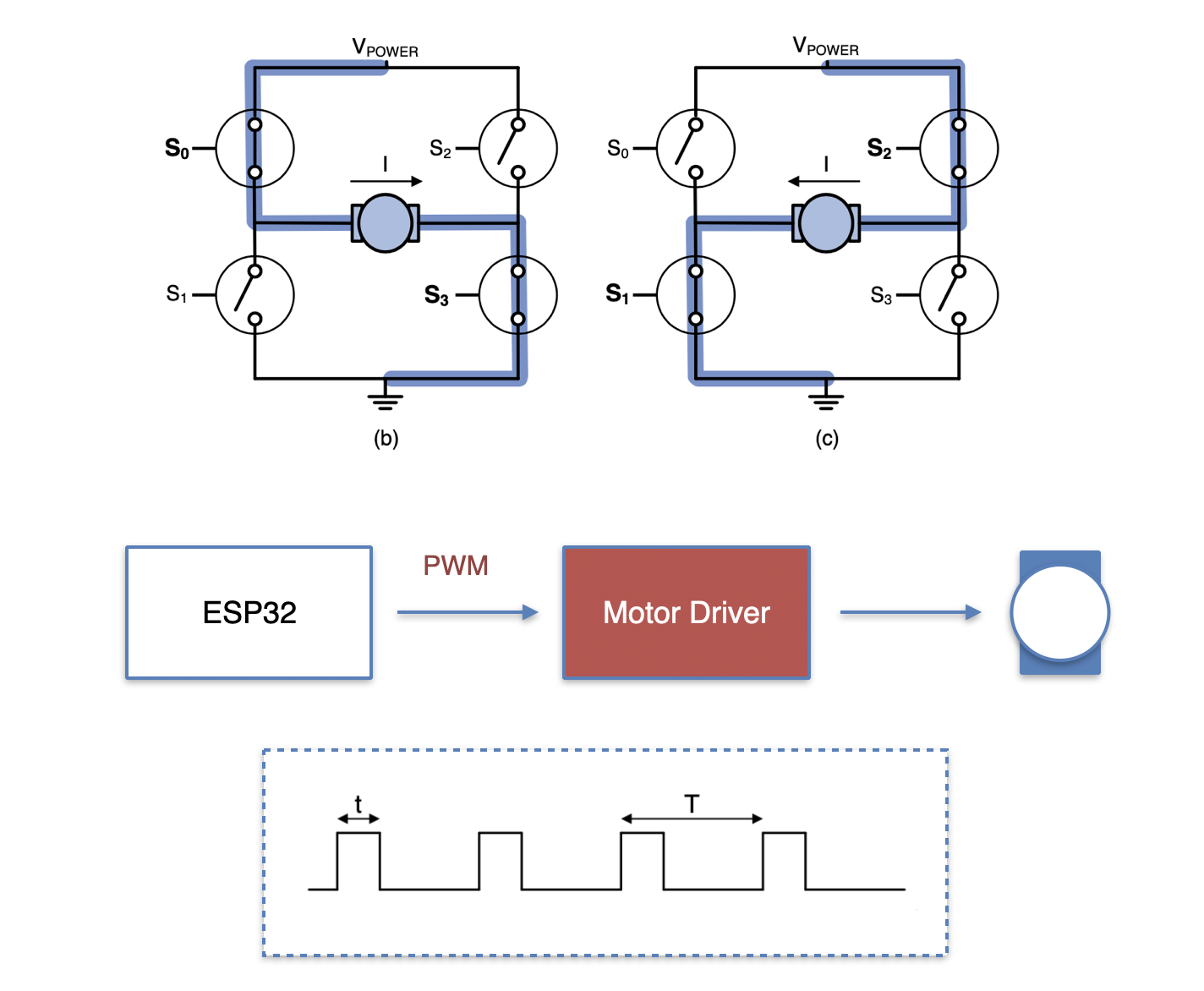
DC 모터에 대한 PWM 제어등에 관한 내용은 기존 잘 설명이 되어 있는 iFLine 강좌를 먼저 참조하시기 바랍니다.
2020-06-28-iFLine-개발강좌_06 ➾
1 | /****************************************************************************** |
1 |
|
1 | /****************************************************************************** |
iFBalance의 iFMotors 클래스의 사용법은 극단적으로 편리합니다. 멈추기 위해서는 move 멤버함수에 0을 입력하면 되고 전방향으로 최대 출력을 위해서는 1023 ( 1024 - 1 ) 입력하면 됩니다.
반대로 역방향으로 움직이기 위해서는 - 값을 입력하면 됩니다.
또한 모터마다 기동 토크가 다를 수 있지만 최소 움직이기 시작하는 PWM 값은 450 정도임을 참고하시기 바랍니다.
이상으로 이번 강좌에서는 모터를 제어하기 위해 작성된 iFMotors 클래스에 대해 살펴보았습니다.